The MoonWheel: MIT Assistive Technology Hackathon
March 2020
At Massachusetts Institute of Technology's 2020 Assistive Technology Hackathon (ATHack) I worked with a team of other Olin students and our co-designer, Eric, to create the MoonWheel--a progressive suspension anti-tip mechanism for manual wheelchair users.
Our project proposal came from Erik, our co-designer, who is a manual wheelchair user and expert in DIY adaptive technology. His goal for the project was to create a system of progressive suspension that would support wheelchair users when they leaned back so that they could learn to do a "wheelie" (a vital skill for manual wheelchair users if they wish to achieve maximum mobility) in a safe and comfortable way.
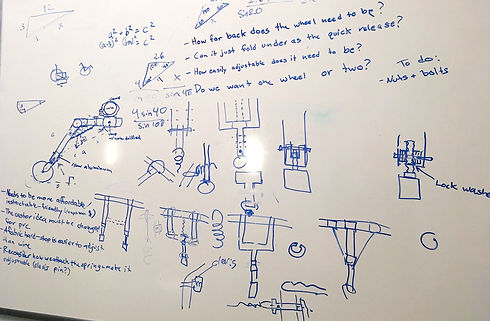


After getting a sense of the project goals and constraints from Erik at our first meeting, the team generated some design ideas. You can see some of them in the photo above. We sent them to Erik for him to critique. His feedback included the sketches on the left, which pointed out some safety concerns that we had overlooked
On the day of the hackathon, we arrived at MIT with only our sketches and the supplies that we had ordered. Twelve hours later we had a working prototype and a website documenting our process so that others could build their own MoonWheel.


We started by reviewing our design with Erik, to make sure that we were all on the same page before starting to build anything.
We then began building a benchtop model out of PVC pipes to test our design. This let us determine most flaws in our design quickly enough to find new solutions. In this phase, I worked out a way to use springs in parallel to make the progressive suspension more gentle, as well as a system for attaching the springs so that the resistance in the suspension was adjustable.


Then, we moved on to prototyping with our real materials. When we realized that the wheel needed to form a right angle with the ground in order to achieve a full range of motion, Eric and I figured out a way to use a hinge as the attachment between the wheel and the frame so that the angle was correct. This photo shows the design before we added the hinge. If you look closely, you can see that the caster wheel is pulled sidewise by the angle of the bar, which made turning more difficult.
Bit by bit, our design came together. I focused on design and assembly, while my teammates tackled the bulk of machining and built the website. Just minutes before our presentation, we realized that the wheel would tuck under the wheelchair if the user went backward too quickly, rendering it useless until the user went forward again. I proposed a solution to this safety concern by attaching extra springs to the exterior of the frame to support the wheel, and it solved the problem


The finished design allowed the wheelchair user to preserve their range of motion, albeit with a slightly larger footprint. Importantly, it allowed the user to lift their front wheels off the ground, which is essential to navigating curbs and uneven terrain.
It also made it nearly impossible to tip over backwards. This is a photo of my teammate demonstrating lifting their front wheels off the ground. Even when they threw their weight backwards as hard as they could, the anti-tipper prevented them from falling over.


We presented our device to the judges and all of the other hackathon competitors. Here is a photo of me describing the MoonWheel while my teammate demonstrated it.
We were awarded the prize for "Best Mechanical Innovation."

We were awarded the prize for "Best Mechanical Innovation."
